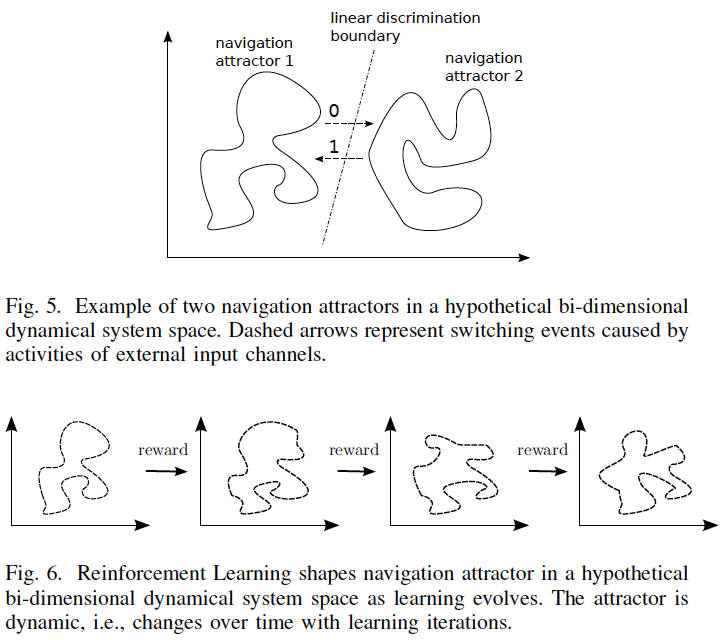
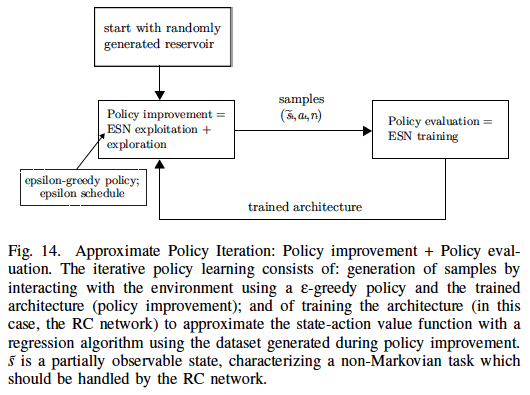
During my PhD, I've worked mainly on Reservoir Computing (RC) architectures with application to modeling cognitive capabilities for mobile robots from sensor data and sometimes through interaction with the environment.
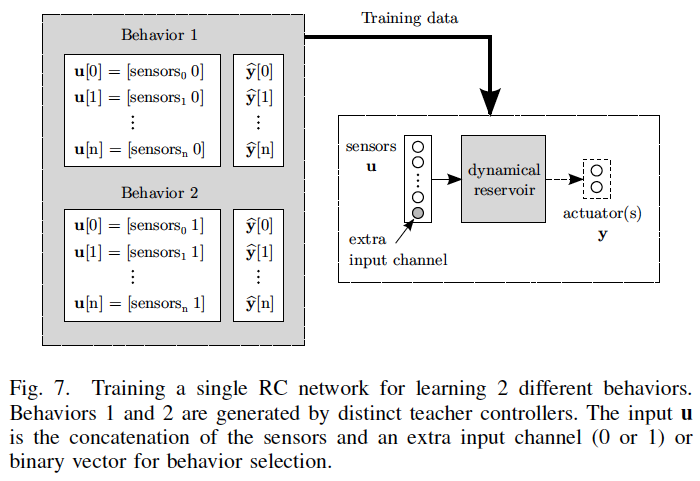
Reservoir Computing (RC) is an efficient method for trainning recurrent neural networks, which can handle spatio-temporal processing tasks, such as speech recognition. These networks are also biological plausible, as recently argued in the literature.
In my case, I used these RC networks for modeling a wide range of capabilities for mobile robots, such as:
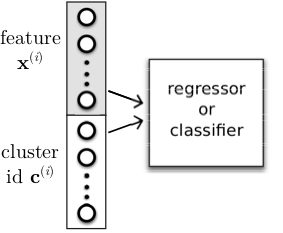
These tasks were modeled basically using regression for learning behaviors or classification for discrete localization.
My PhD thesis can be download here. It is entitled: "Reservoir Computing Architectures for Modeling Robot Navigation Systems".
My publications are listed and can be downloaded in Google Scholar or here.
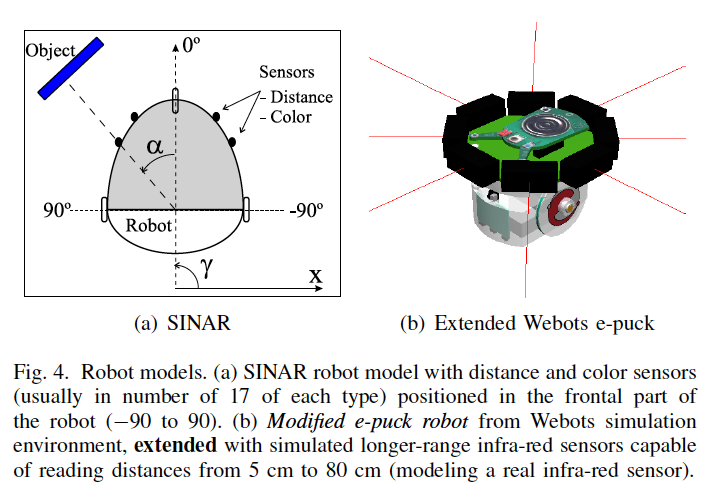
Some simulated and real robots employed in the experiments:
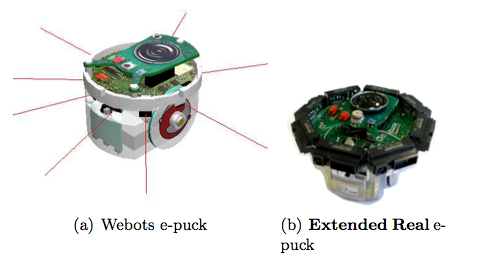
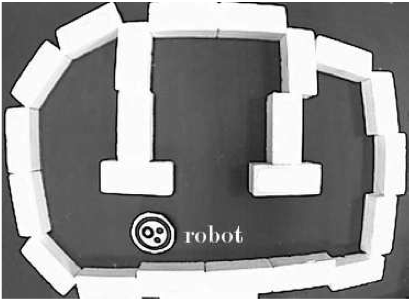
Environment used for localization experiments using the real e-puck robot:
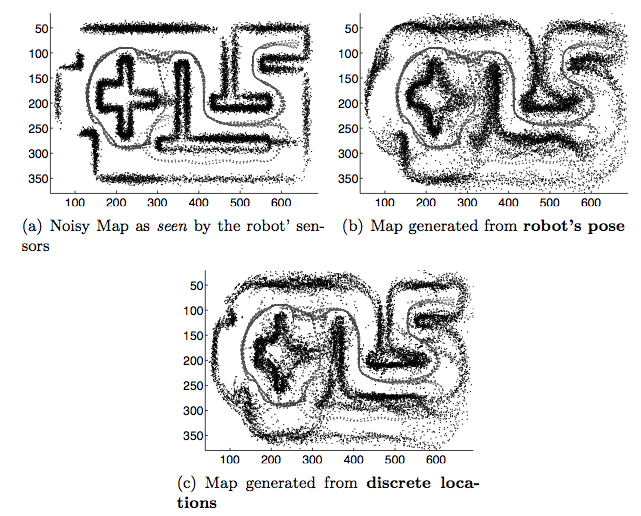
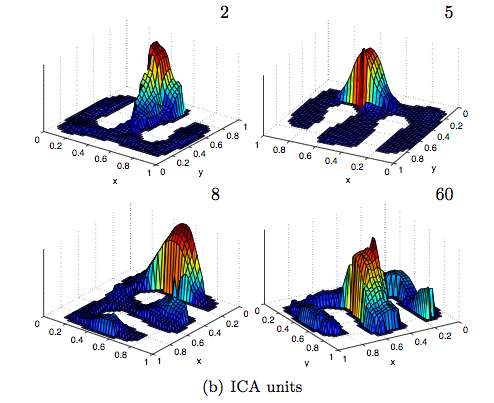
After using unsupervised learning methods for self-localization, the plots below show the mean activation of place cells as a function of the robot position in the environment.
Red denotes a high response whereas blue denotes a low response.
It is possible to perform map generation through sensory prediction given the robot position as input. Black points represent the sensory readings whereas gray points are the robot trajectory.