Our paper, resulting from work of Master student Gustavo Claudio Karl Couto, entitled "Hierarchical Generative Adversarial Imitation Learning with Mid-level Input Generation for Autonomous Driving on Urban Environments" has shown very interesting results:
Both the intermediate mid-level input BEV representation and the control policy are learned as the agent navigates in an urban town (click for more videos from playlist).
Reinforcement learning of robot behaviors (Master thesis)
Submitted by erantone
on Wed, 12/09/2015 - 14:02
Title of Master thesis: A Neural Reinforcement Learning Approach for Intelligent Autonomous Navigation Systems
Classical reinforcement learning mechanisms and a modular neural network are unified to conceive an intelligent autonomous system for mobile robot navigation. The conception aims at inhibiting two common navigation deficiencies: generation of unsuitable cyclic trajectories and ineffectiveness in risky configurations. Different design apparatuses are considered to compose a system to tackle with these navigation difficulties, for instance: 1) neuron parameter to simultaneously memorize neuron activities and function as a learning factor, 2) reinforcement learning mechanisms to adjust neuron parameters (not only synapse weights), and 3) a inner-triggered reinforcement. Simulation results show that the proposed system circumvents difficulties caused by specific environment configurations, improving the relation between collisions and captures.
Video (inhibiting unsuitable cyclic trajectories through reinforcement learning):
The robot starts not knowing what it should do in the environment, but as times passes, we can see that it interacts with the environment by colliding against obstacles and capturing targets (yellow boxes). Each collision elicits an appropriate innate response, i.e., aversion. As more collisions take place, its neural network learns to associate obstacles (and its blue color) with aversion behaviors such that it can deviate from obstacles (emergent behavior). The same process occurs for target capture being associated with attraction behavior through learning. In the end, the robot can navigate the environment efficiently, capturing targets, effectively suppressing cyclic trajectories common to such reactive systems.
Video (robot cooperation; each robot trained with previous neural network architecture)
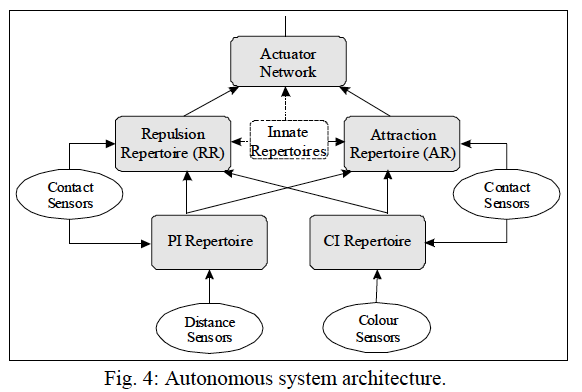
The intelligent autonomous system corresponds to a neural network arranged in three layers (Fig. 4). In the first layer there are two neural repertoires: Proximity Identifier repertoire (PI) and Color Identifier repertoire (CI). Distance sensors stimulate PI repertoire whereas color sensors feed CI repertoire. Both repertoires receive stimuli from contact sensors. The second layer is composed by two neural repertoires: Attraction repertoire (AR) and Repulsion repertoire (RR). Each one establishes connections with both networks in the first layer as well as with contact sensors. The actuator network, connected to AR and RR repertoires, outputs the adjustment on direction of the robot.