
ESN-PNMPC: Efficient data-driven model predictive control of unknown nonlinear processes
The control of nonlinear industrial processes is a challenging task since the model of the plant may not be completely known a priori. In addition, the application of nonlinear model predictive control may be affected by modeling errors and subject to high computational complexity.
In this work, a new efficient data-driven scheme is proposed that alleviates some known issues in the so called Practical Nonlinear Model Predictive Controller (PNMPC). In PNMPC, the model is only linearized partially: while the free response of the system is kept fully nonlinear, only the forced response is linearized. The general model for PNMPC proposed in this work consists of an Echo State Network (ESN), a recurrent neural network with very efficient training for system identification.
The benefit of the proposed ESN-PNMPC scheme is that it allows:
- fast system identification for nonlinear dynamic systems with arbitrary accuracy;
- analytical computation of derivatives from the ESN model for the forced response.
This last feature assures significantly lower computational complexity for derivative computation when compared to the original finite difference method of PNMPC.
The proposed scheme is also enhanced with a correction filter that provides robustness to unforeseen disturbances during execution time, and compared to an LSTM (Long-Short Term Memory) implementation for the model as well as to a PI controller. The universality of the approach is shown by application to the control of different nonlinear plants.
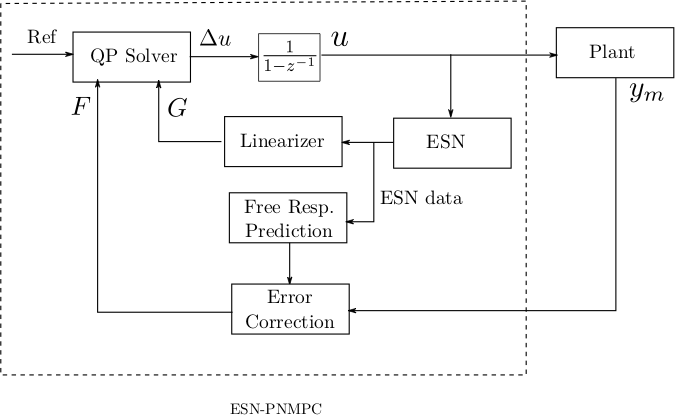
Figure from J. Jordanou 2020, et al (submitted).
Research area:
Oil and Gas