Process measurements are of vital importance for monitoring and control of industrial plants. When we consider offshore oil production platforms, wells that require gas-lift technology to yield oil production from low pressure oil reservoirs can become unstable under some conditions. This undesirable phenomenon is usually called slugging flow, and can be identified by an oscillatory behavior of the downhole pressure measurement.
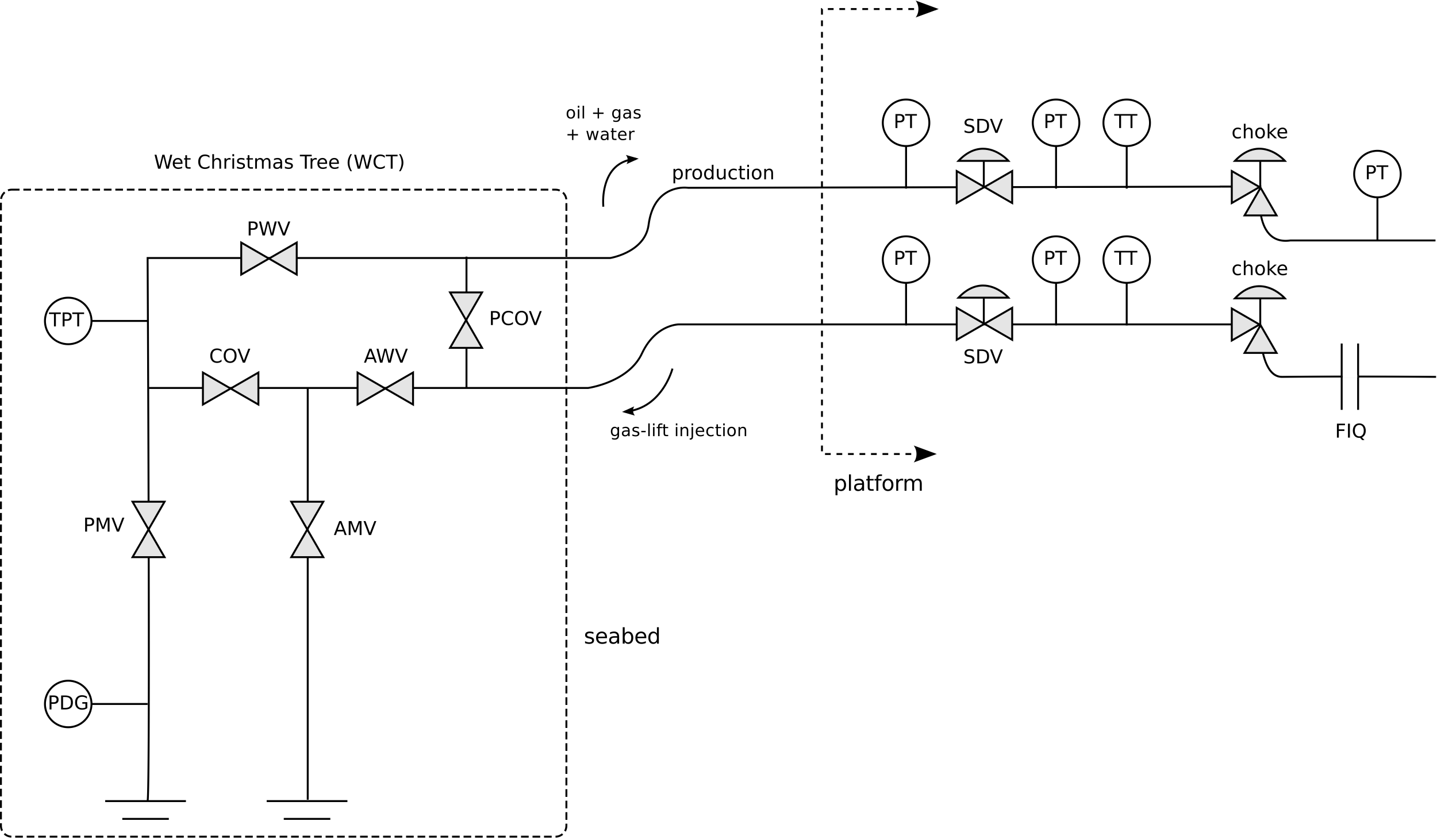
Given the importance of this measurement and the unreliability of the related sensor, this work aims at designing data-driven soft-sensors for downhole pressure estimation in two contexts: one for speeding up first-principled model simulation of a vertical riser model; and another for estimating the downhole pressure using real-world data from an oil well from Petrobras based only on topside platform measurements. Both tasks are tackled by employing Echo State Networks (ESNs) as an efficient technique for training Recurrent Neural Networks.
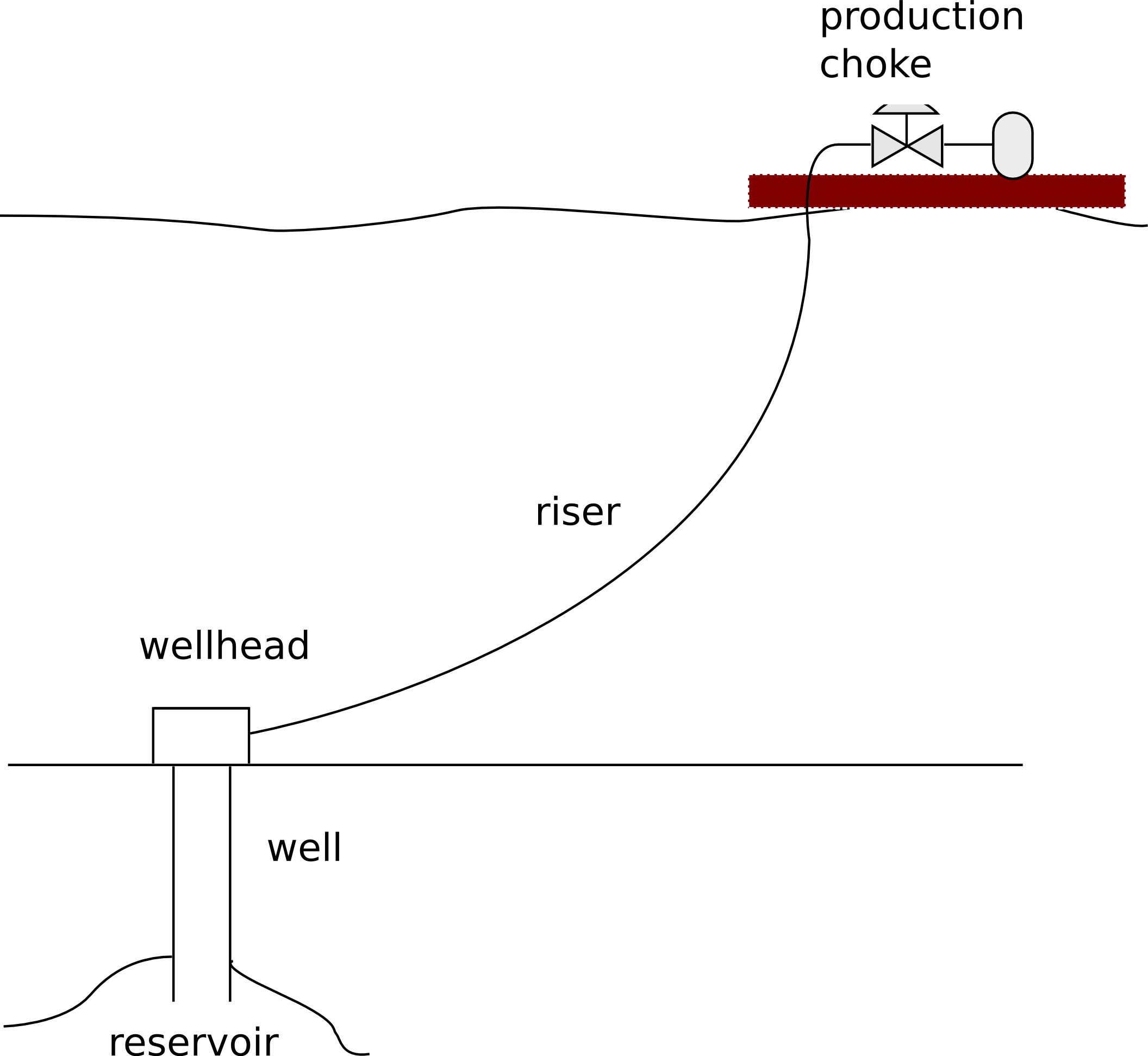
We show that a single ESN is capable of robustly modeling both the slugging flow behavior and a steady state based only on a square wave input signal representing the production choke opening in the vertical riser. Besides, we compare the performance of a standard network to the performance of a multiple timescale hierarchical architecture in the second task and show that for some periods the latter architecture performs better.